




簡介:無人艇作為海洋無人系統的重要一環(huán),其應用價值和戰(zhàn)略意義日益增長。本文從海洋作業(yè)需求出發(fā)介紹了無人艇及艇-機協同作業(yè)面臨的一系列挑戰(zhàn),并針對性地講解了目前該領域包含裝備制造、理論研究、應用示范在內的最新研究進展和突破。內容涵蓋控制、感知、集群網絡調控與無人系統路徑規(guī)劃,詳細地對自主無人艇-機集群跨域協同核心理論、關鍵技術及應用情況進行了介紹。
海洋無人系統是國家海洋強國戰(zhàn)略的重要使能技術之一。無人艇作為海洋無人系統的重要一環(huán),其應用價值和戰(zhàn)略意義也日益增長。在重大海洋設施探測等作業(yè)過程中,往往面臨著惡劣、高強度作業(yè)水域的突發(fā)情況,對無人艇集群協同種類、抗擾能力、覆蓋廣度、目標識別精度等提出的要求日益嚴苛。傳統艇群協同技術難以做到“以突變應對突發(fā)”。同時,隨著海洋作業(yè)需求日趨復雜,水面無人艇集群拓展為海空跨域無人艇-機集群,但其高效、超穩(wěn)、高精協同控制技術一直是國際性難題,尚未形成系統的理論與技術解決方案。
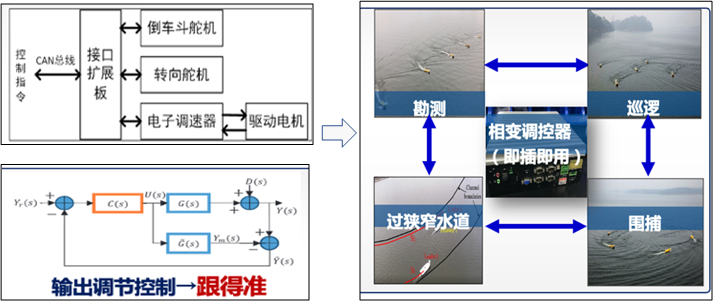
圖1、自主無人艇集群隊形高精度航跡跟蹤與相變調控
為解決上述難題,研究者陸續(xù)開展對水面異構無人艇集群協同裝備、理論與技術研究,聚焦于如何使無人艇能“控得穩(wěn)、走得直”。船體是無人艇的外驅,目前常見的無人艇有單體、雙體結構,單體速度快,雙體航行穩(wěn),為了使無人艇能滿足內河湖、港區(qū)和近海作業(yè)需求,往往將多類異構無人艇進行編隊,協作完成指定任務。如圖1所示的航行控制器則是無人艇的內驅,目前航向和航速的耦合機理桎梏著無人艇航行的控制精度,如何對其解耦,實現兩者的高精控制是國內研究者正在討論的熱點。
在上述無人艇控制理論技術基礎上,無人艇-機集群跨域協同研究也在如火如荼地展開,主要包含以下幾個方面:1、無人艇-機集群作業(yè)隊形的相跨域協同方法和技術:其關鍵在于如何在水面運動無人艇的無人機起降、艇-機編隊跨域協同效率取得突破,解決快慢子系統的協調問題,以達到提高協同無人艇-機類型,降低水面運動艇-機自主降落誤差的目的。達到“調控靈、應對快”。2、集群協同覆蓋、多艇多源感知與高精識別跟蹤技術:對無人艇-機協同任務來說,其重點在于如圖2所示,將探測模式從平面拓展為立體,提高檢測遺落率,降低識別誤差,重點在于解決目標姿態(tài)變化、遮擋、視角畸變、粼光、雨霧、抖動等帶來的影響,做到“識得全、看得清”。目前隨著人工智能技術的發(fā)展,研究者將Transformer結構引入到目標識別領域。利用其獨有的自注意力機制,使集群自適應地對信息進行多層次、跨空間、跨時間的關聯,極大地提升了識別的精度。
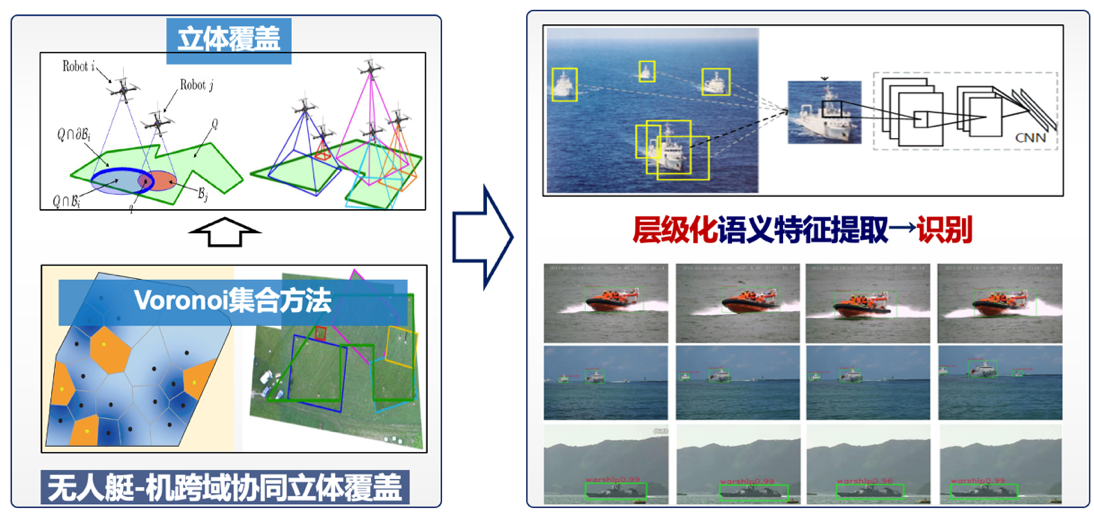
圖2、自主無人艇集群協同覆蓋探測與目標識別
3、集群韌性增強技術:研究者借助機器學習對無人艇-機集群任務執(zhí)行數據進行分析,精準定位網絡的崩潰臨界點,以此來實現集群故障的“點穴式”提前阻斷、增強集群韌性,實現故障自愈合。4、無人艇-機路徑規(guī)劃技術:以往借助快速擴展隨機樹、人工勢場、動態(tài)規(guī)劃、貝塞爾曲線、遺傳、粒子群優(yōu)化等算法能解決簡單場景下路徑的自主規(guī)劃,但如今作業(yè)環(huán)境日益嚴峻復雜,傳統的規(guī)劃算法難以兼顧實時性、平滑性和安全性的需求。目前,研究者逐漸采取利用傳統啟發(fā)搜索等算法實時規(guī)劃最優(yōu)路徑,同時結合深度強化學習算法實現復雜環(huán)境下的自主避碰的方式來突破二者的局限性。
以上就是無人艇-機協同領域當前的難點與熱點,目前國內無人艇-機集群的研究已逐漸從理論走向實現,開始逐步應用到海洋探測、海上風電場建設等重要工程,逐漸在各類重大海洋設施建設中嶄露頭角。
