




4月19日下午,2019國家機器人發展論壇暨RoboCup機器人世界杯中國賽之“共融機器人”專題論壇在浙江紹興柯橋成功舉辦,八位領域內專家學者從機器人控制、群體機器智能、類生命機器人、移動機器人、柔性撲翼機器人等方面進行報告,并與參會者進行充分交流,共同探討機器人與人共融領域共同的發展前景,來自機器人、智能制造、國防安全、自動化等領域代表參加了此次論壇。論壇主席、清華大學教授劉辛軍主持。

第一個帶來報告的是浙江大學李鐵風教授,報告題目是“The Control and Reinforcement Learning of a Soft Robot”。李教授指出,相對于傳統剛性機器人,由刺激響應材料驅動的軟體機器人具有獨特的優勢,如驅動大、重量輕、韌性高,還有著生物相容性。
然而,軟體機器人的大型驅動本質上是難以實現高精度控制的。報告展示了一種由柔性人工肌肉驅動的模仿墨魚的機器人,它帶有一套完整的機載系統,包括電源和無線通信系統。在沒有任何驅動的情況下,墨魚機器人的運動完全由介質彈性體驅動,具有變形程度大、能量密度高等類似肌肉的特性。采用強化學習的方法對墨魚機器人的控制策略進行優化,以此代替人工調整。閉環反饋控制和機器學習可以應用于軟體機器人的系統中,以提高其性能。從零開始,機器魚的游泳速度隨著學習的強化而得到提高。基于這種機器魚結構和控制的設計原理可用于指導設備的設計,以滿足諸如柔性設備和軟體機器人等較高要求的應用。

北京科技大學賀威教授的報告題目是“柔性撲翼飛行機器人關鍵技術”。賀教授指出,柔性撲翼飛行機器人是受昆蟲和鳥類飛行方式啟發的一類飛行機器人,與常見的固定翼和旋翼飛行器相比,柔性撲翼飛行機器人具有質量輕、效率高、機動性強、能耗低等優點,是飛行機器人發展的重要方向。撲翼飛行機器人的翅膀一般采用柔性結構,在飛行中受到氣流作用會產生預期之外的振動和形變,從而影響飛行性能,甚至縮短使用壽命。
一方面,柔性結構提高了撲翼飛行機器人系統的機動性和飛行效率;另一方面,柔性結構的使用使得撲翼飛行機器人的動力學更加復雜,控制系統的設計也更加困難。賀教授在報告中,討論了柔性撲翼飛行機器人的關鍵技術,重點研究柔性撲翼機器人的自主控制和系統設計問題,分析撲翼飛行機器人的動力學模型,針對自主控制問題提出了神經網絡控制方法,針對振動問題提出了自適應邊界控制策略,搭建了幾款仿生柔性撲翼飛行機器人,能夠完成自主飛行、自主避障、實時航拍等任務。最后對該方向進行研究展望。
清華大學劉辛軍教授,報告題目為“大型結構件原位加工機器人創新設計”。劉教授指出,人類為了狩獵獲取食物,發明了工具,揭開了人類創新發明機器的序幕。大自然界的生命體的行為,例如鼠鼬打洞、象鼻蟲筑繭、啄木鳥啄木以及工匠的精雕細琢,有一個共同特征,即:移動定位,局部精細作業。大型復雜構件是航空航天、能源、船舶等領域裝備的核心結構件,其高效高質量制造是亟待解決的難題。基于大自然界的生命體的行為特征,報告介紹一種移動式加工機器人的設計理念和構思方案,給大型結構件的加工提供了一種新模式。
美國俄亥俄州立大學張明君教授在題為“基于生物啟發的機器人控制問題探討”的報告中,指出生物智能及控制方法的進化規律研究不僅對了解生物機理和疾病治療有重要意義,也對創新開發具有生物兼容性、高智能的機器人系統有獨特的啟發意義,尤其是對實現高社會和經濟價值的人機共融系統有重要的參考價值。
報告以多尺度生物系統為實例,從生物智能和控制的角度揭示其工作規律,并以具體工程實現為例探討其在機器人控制方面的應用,以尋找更有利于人機共融的機器人控制方法。同時,以傳感、執行和控制為核心展開探討生物與工程系統在智能和控制方面的不同之處,特別是對微納系統控制的工程實現手段和局限性進行深入討論,進一步闡明由于生物系統的多樣性決定了高生物兼容性、高綜合價值的人機共融系統期待新的微納系統控制理論,特別是能與硅計算機系統接口的、超快、超小的基于有機材料的機器人控制系統。這也是對人機共融的巨大挑戰,未來技術革命的新機遇,對生命科學和健康產業有著舉足輕重的作用。

群體智能是廣泛存在于生物界和人類社會的一種重要智能形式,是智能領域的前沿方向。群體機器智能是有別于群體生物智能和群體社會智能的“新物種”,是由機器人集群的合作所表現出來的群體智能,是機器人與群體智能領域的交叉,是解決機器智能挑戰性問題的新的研究途徑。

大自然億萬年的進化使得生命系統具備具備了與生存環境相適應的組織、器官和結構,這為人類的技術創新提供了無限的想象空間,成為人類取之不盡用之不竭的靈感來源。以仿生學為基本思路,機器人研究取得了令人震撼的迅猛發展。然而生命系統如此精妙,仿生學意義上的人工系統很難完全復現生命系統的本征特性,如何進一步提升性能,讓人工系統逼近乃至超越生命系統是當前科技界的研究熱點。
對此,中國科學院沈陽自動化研究所劉連慶研究員在題為“類生命機器人模塊化制造與動力學建模調控方法研究”的報告中,提出類生命機器人的研究理念,通過生命系統和機電系統在分子和細胞尺度的融合,推動機器人系統由非生命介質向生命介質轉變,使得機器人同時具備生命系統和機電系統的優點,進而提升機器人的各種性能、帶動機器人學科的發展。報告以類生命驅動為例,介紹如何以活體細胞為物質載體,通過與機電系統的結合,實現可控的類生命驅動,并對生物介質開展動力學建模和調控研究,演示出類生命機器人理念的先進性和效果。
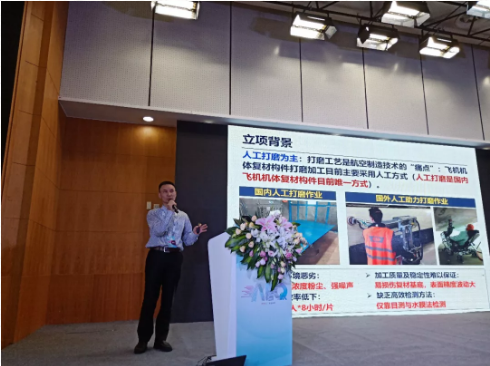
華中科技大學陶波教授的報告題目是“大型復雜構件移動機器人自律加工技術研究”。報告指出,大型復雜構件在航空航天、能源和軌道交通等領域有著廣泛的應用,其自由曲面外形尺寸精度與表面粗糙度對提高其空氣或流體動力學性能至關重要,需要通過先進的光整加工技術實現高精度、高表面質量制造。以形位精度與表面質量控制為目標的高效高精度制造是超大型復雜構件加工的關鍵難題。
相比數控機床,移動機器人具有運動靈活度高、作業空間大、環境適應性和并行協調能力強等優勢,以移動機器人作為制造裝備的執行體,利用機器人的柔順性,將高技能的人工經驗數字化并固化在機器人操作控制中,并配以強大的感知功能,將使機器人成為不知疲倦的“能工巧匠”,從而實現自動加工向智能加工轉化,為超大復雜構件的高效高品質加工提供新的解決思路。陶教授結合本人在機器人化智能制造領域的科研經歷,與參會者分享近年來本人及所在研究團隊在大型復雜構件機器人移動加工領域的研究與應用體會。
帶來最后一場報告的是西安交通大學蘭旭光教授,報告題目是“人機協作中基于物體功能的機器人自主作業與運動預測”。
人機協作中機器人自主操作和運動預測是共融機器人的重要研究內容,報告提出了一種基于物理穩定性和物體功能的適用于多目標堆疊物體場景中的抓取方法。通過基于卷積網絡的機器人抓取關系推理,構建條件隨機場圖模型,實現對場景的感知、理解與推理,得到物體間空間關系、物體功能與抓取部位之間的關系以及物體功能和作業之間的關聯關系建模;最后基于有向錨點框機制,該網絡同時完成全卷積結構的物體抓取部位實時檢測,在康奈爾抓取數據集的五折交叉檢驗上取得了99.44%的準確率,是目前精度最高的算法。
為實現物理關系推理網絡的訓練,采集了包含超過5000張圖片的視覺操作關系數據集,并基于物體三維模型,建立虛擬圖像庫。為了進一步拓展虛擬訓練圖像庫的學習效果,研究了zero-shot的學習方法,構建了正交空間和正交量化方法實現了模型方法的遷移學習;最終通過結合正確的抓取順序和抓取部位,我們能使機器人以正確的順序和功能準確地對多個目標堆疊物體抓取和作業。
當前,國家自然科學基金委員會已成立“共融機器人基礎理論與關鍵技術”重大研究計劃,通過面向智能制造、醫療康復、國防安全等領域對共融機器人的需求,開展共融機器人結構、感知與控制的基礎理論與關鍵技術研究,為我國機器人技術和產業提供源頭創新思路與科學支撐。未來,機器人可能有多模態傳感,會更加理解人類需求,共融機器人將成為未來發展的趨勢,實現人機智能化的自然交互。
學會秘書處 供稿
